Il Cestino Smart scomposto
L’ultimo decennio è stato contrassegnato da un aumento delle problematiche legate al rispetto dell’ambiente ed al risparmio energetico. Il riscaldamento del pianeta, la guerra in Ucraina e la conseguente crisi energetica, impongono tutti a ripensare alle abitudini quotidiane.
La scuola ha il dovere di intervenire sulle nuove generazioni, fornendo loro le competenze e la sensibilità necessaria per rispettare il nostro pianeta.
Noi di Arduino Facile siamo convinti che i piccoli gesti, quelli concreti, alla portata di tutti, siano quelli che maggiormente ci avvicinano alla realtà, che, a volte, ci sembra lontana da noi.
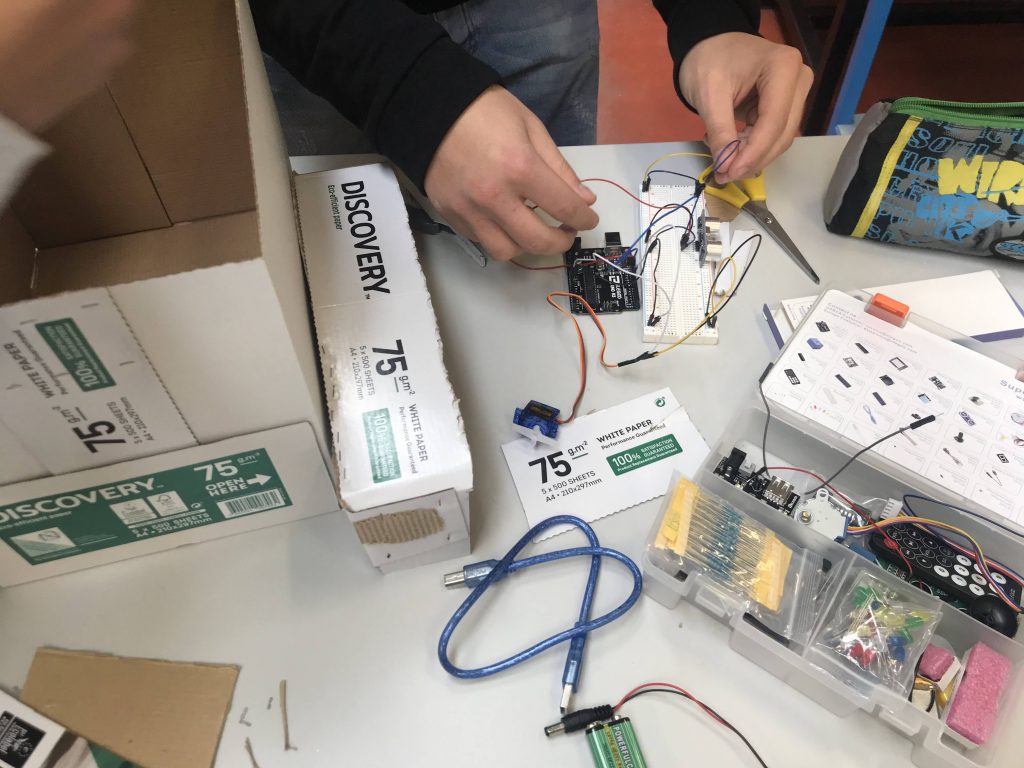
All’ITIS “E.Mattei” di Urbino (https://www.itisurbino.edu.it/), gli studenti della 3BMC, dell’indirizzo di Meccanica e Meccatronica, si sono cimentati nella realizzazione di un cestino “intelligente”, che, alle pratiche igieniche, unisca ad esempio la raccolta differenziata dei rifiuti.
Il punto di partenza è stato il nostro articolo https://www.arduinofacile.it/2021/05/13/il-cestino-smart/
Successivamente la classe è stata divisa in gruppi di 4/5 studenti che hanno lavorato in modalità jigsaw: ogni componente si è specializzato in una particolare competenza, che poi ha condiviso con i compagni.
Il resto è stato un mix di fantasia ed immaginazione…
Ogni gruppo, infatti, ha interpretato a suo modo la consegna, ed ha elaborato una propria versione del cestino smart. Ne è nata una competizione agguerrita in cui ha avuto la meglio il gruppo denominato “Marrakesh” che ha realizzato un cestino con apertura a due ante, e una spia ad indicare il riempimento.
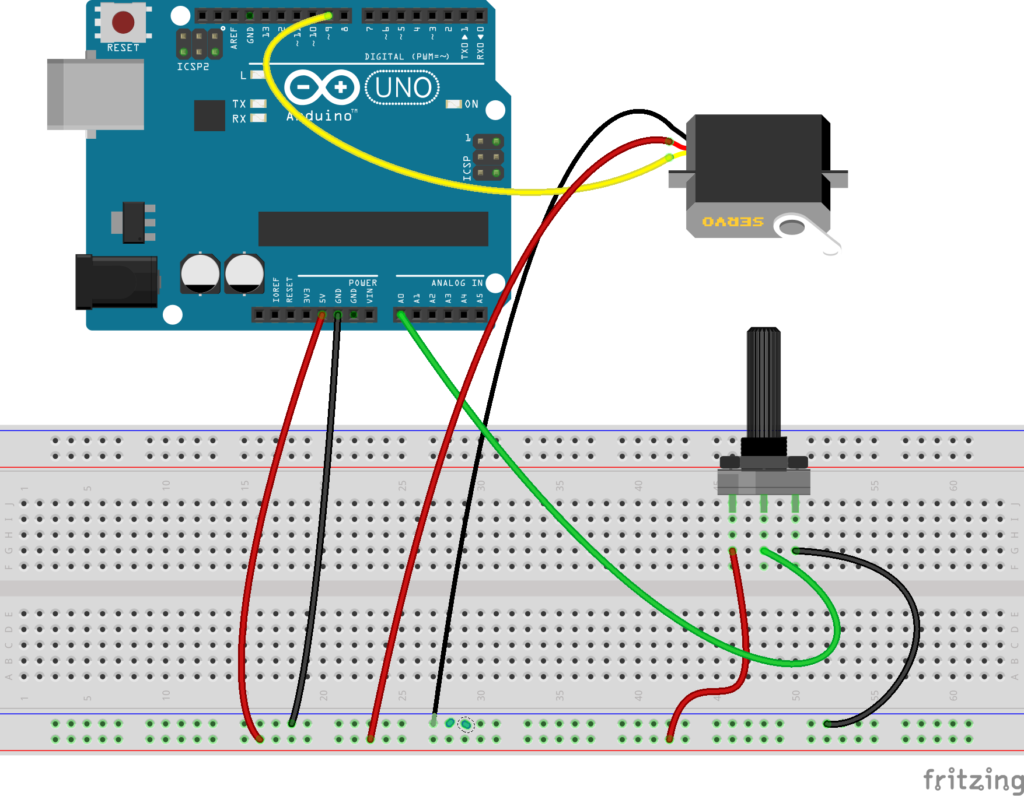
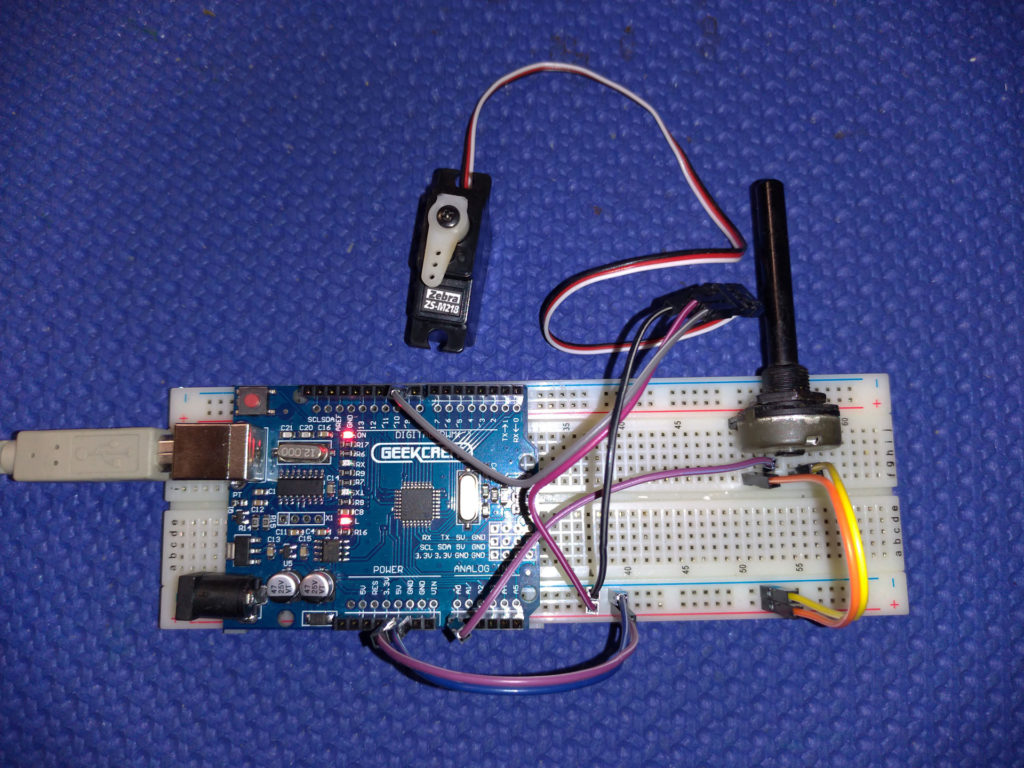
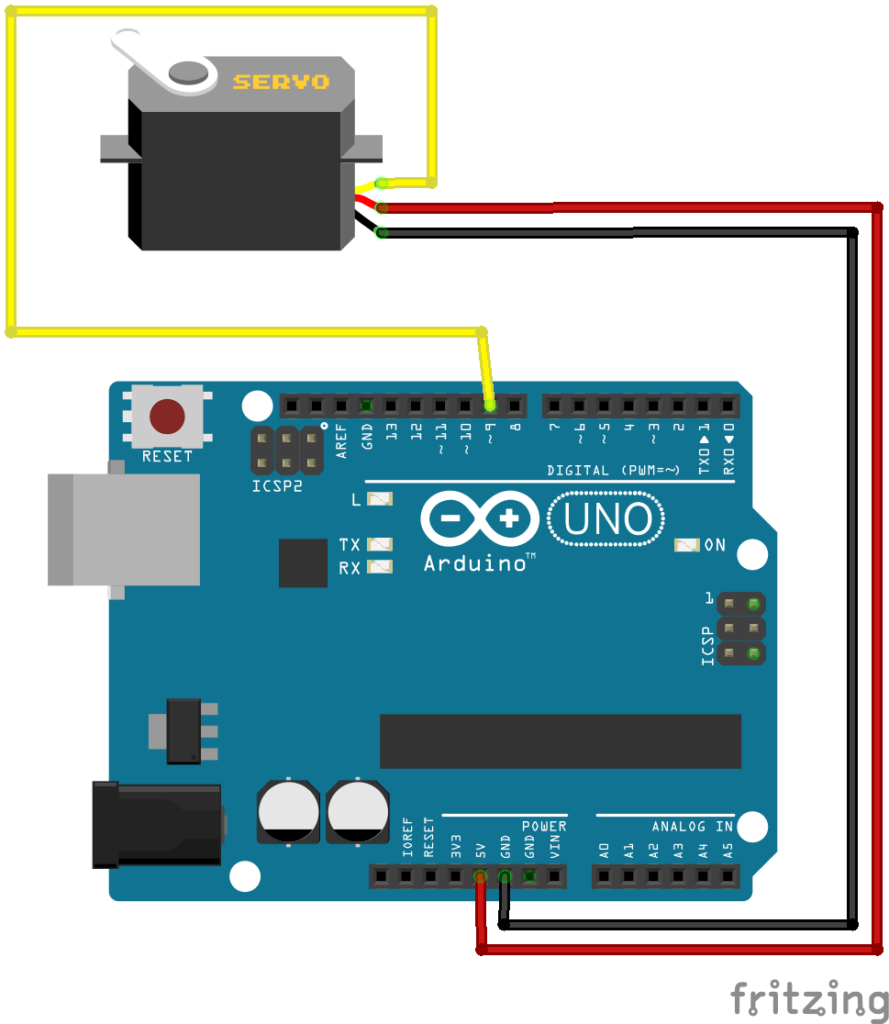
Le istruzioni di montaggio sono disponibili nella seguente presentazione preparata dai componenti del gruppo
Al secondo posto si è piazzata un’altra versione, ancora più amica dell’ambiente: un cestino formato maxi, con due ante, per differenziare i rifiuti
Infine, sul podio un cestino più classico con la segnalazione di apertura.