Barra LED (Knight Rider) [Avanzato]
Obiettivo: Realizzazione della barra LED utilizzata nella serie TV Knight Rider.

Prerequisiti:
Componenti elettronici:
- Arduino UNO
- Breadboard
- 6 Led
- 6 Resistenze (100 Ohm)
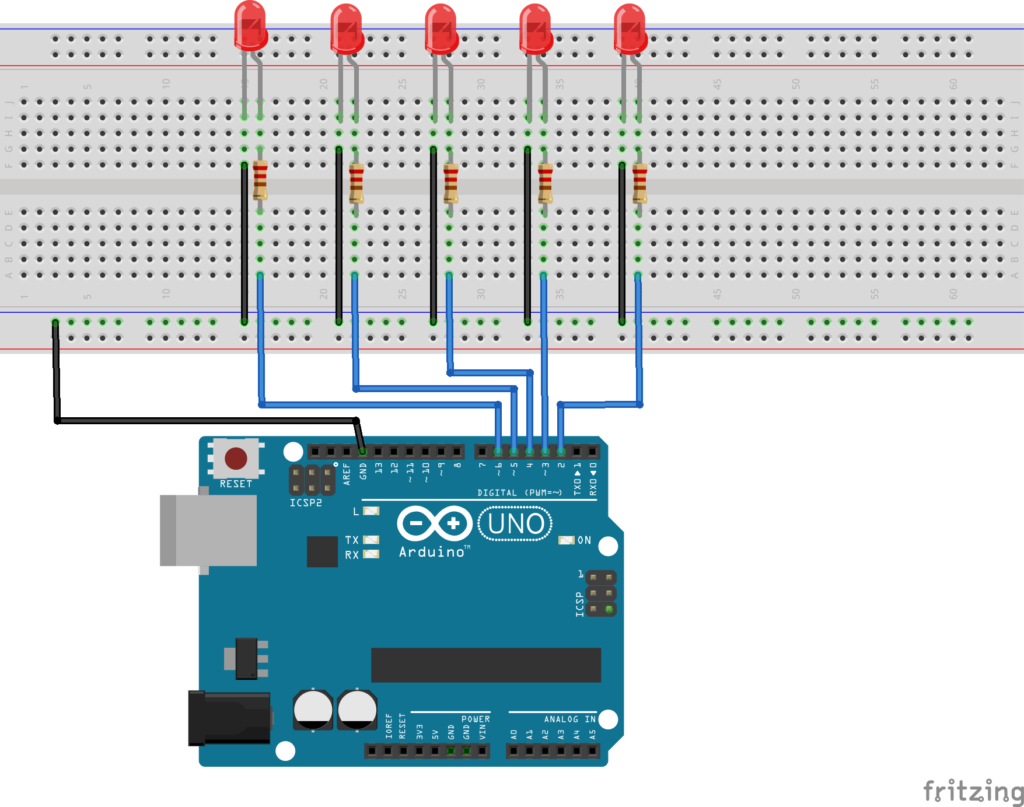
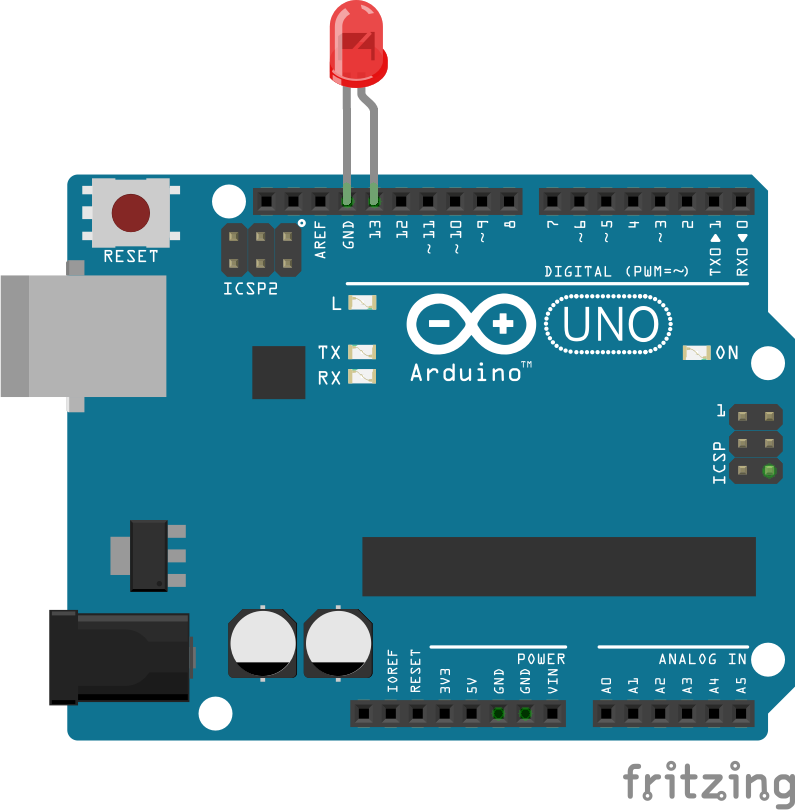
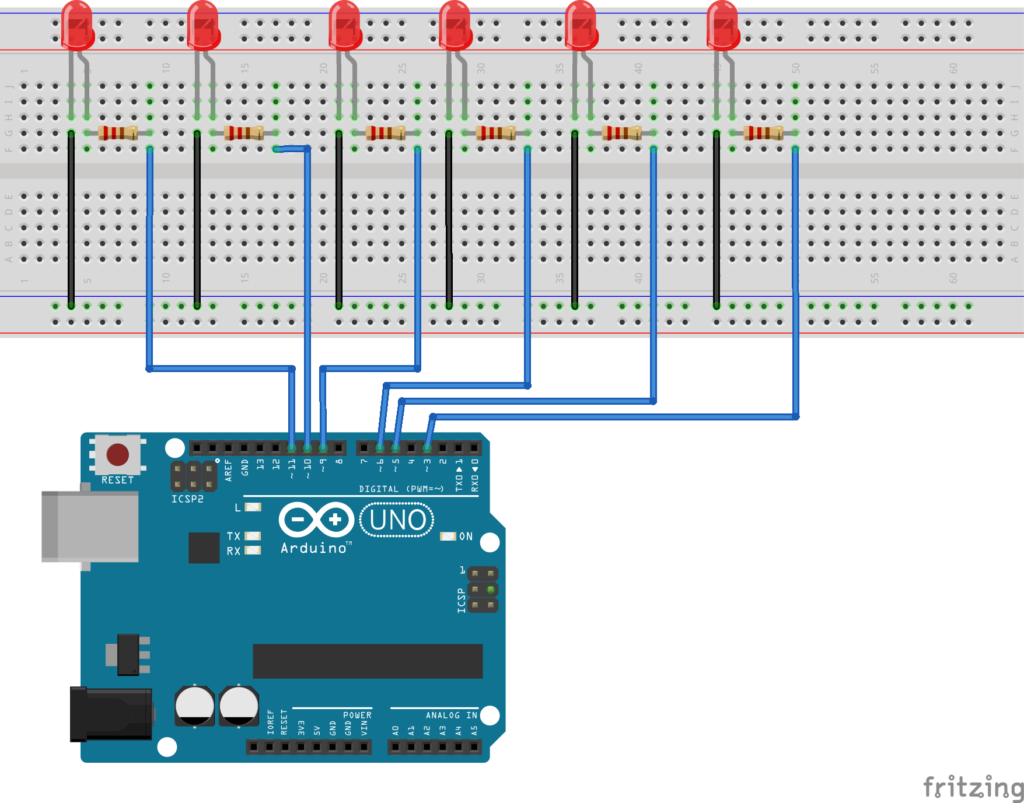
Teoria: Al fine di realizzare una barra LED (Light Emitting Diode), 6 diodi ad Emettitore di Luce sono stati utilizzati e collegati a differenti PIN digitali di Arduino. Come nelle lezioni precedenti ad ogni LED è associata una resistenza al fine di limitare il passaggio di corrente.
A differenza della barra led riportata nei prerequisiti, dove un solo led era acceso, in questa attività più led sono accesi in contemporanea. Nello specifico attraverso l’istruzione analogWrite l’intensità luminosa viene modulata in quattro differenti livelli.
Collegamento Circuitale:
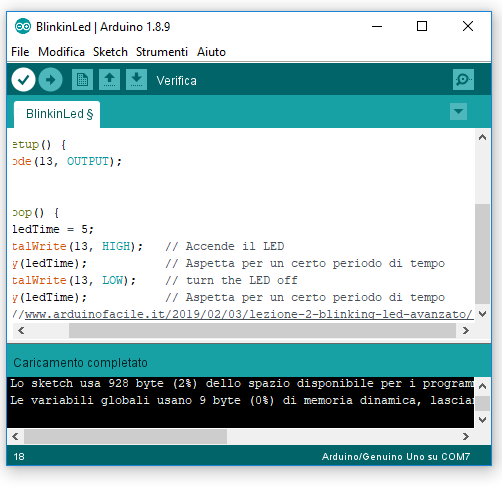
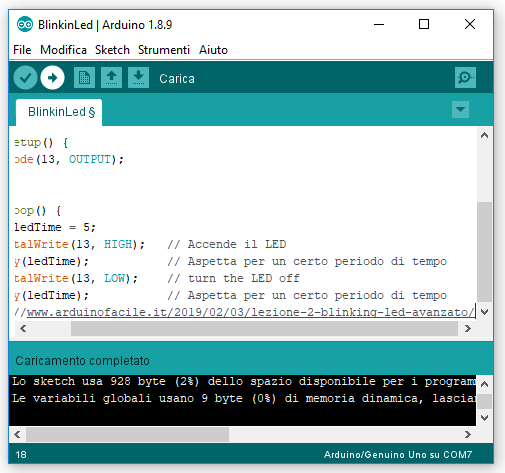
Codice:
Personalizzazioni: E’ possibile modificare il comportamento del circuito in questione intervenendo sul valore della variabile ledTime. Modificando il suo valore infatti cambia la velocità di lampeggiamento della barra LED.