Controllo di Temperatura e Umidità mediante DHT11
Obiettivo: Realizzare un controllo di temperatura e umidità mediante il sensore DHT11.
Componenti elettronici:
- Arduino UNO
- DHT11
Teoria: Il DHT11 è un sensore digitale per la misura della temperatura ed umidità molto stabile e semplice da usare e configurare.
E’ un sensore di basso costo che ha un range di misurazione dell’umidità che va da 20%RH al 90%RH (con una precisione di 5%RH) e di temperatura da 0 a 50°C (con una precisione di 2°C)
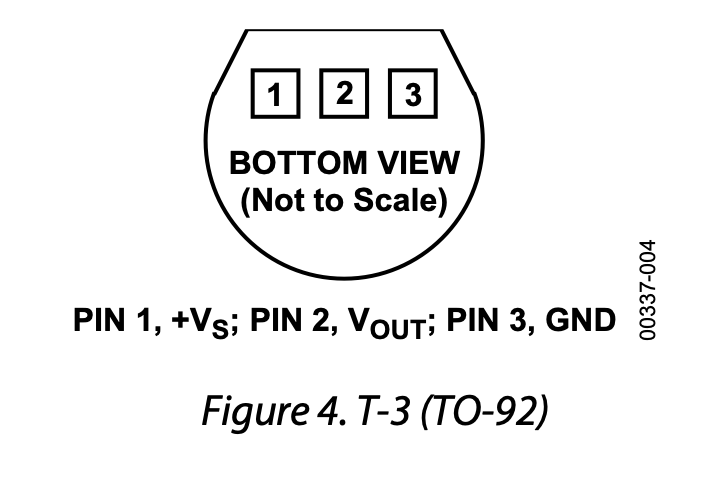
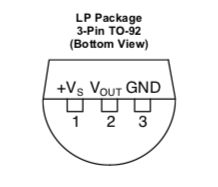
Il sensore si presenta con tre pin.
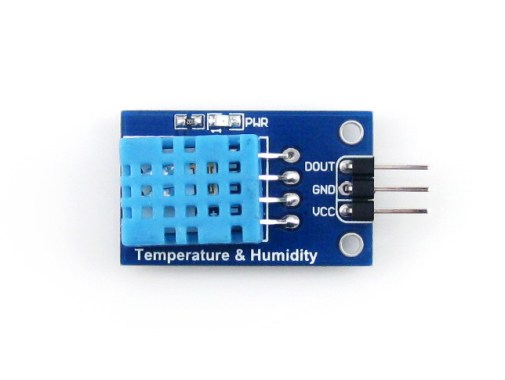
Guardando il dispositivo dal lato della parte sensibile, si ha che il pin di sinistra è quello dell’alimentazione (5V), quello centrale è il GND e il destro è il PIN del segnale digitale, da collegare ad un’uscita digitale di Arduino.
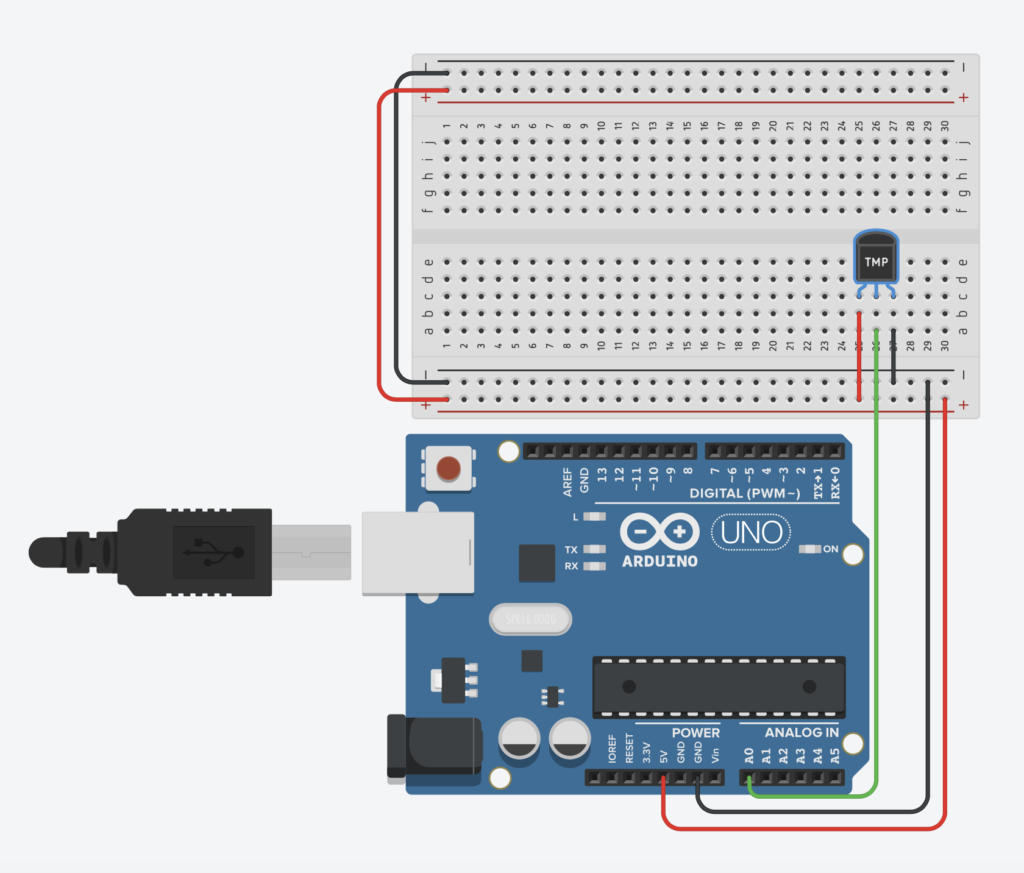
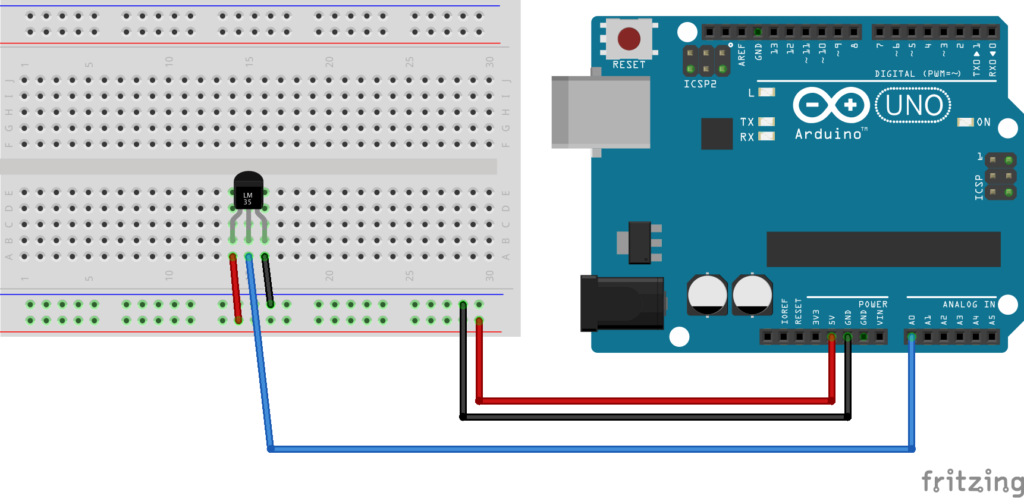
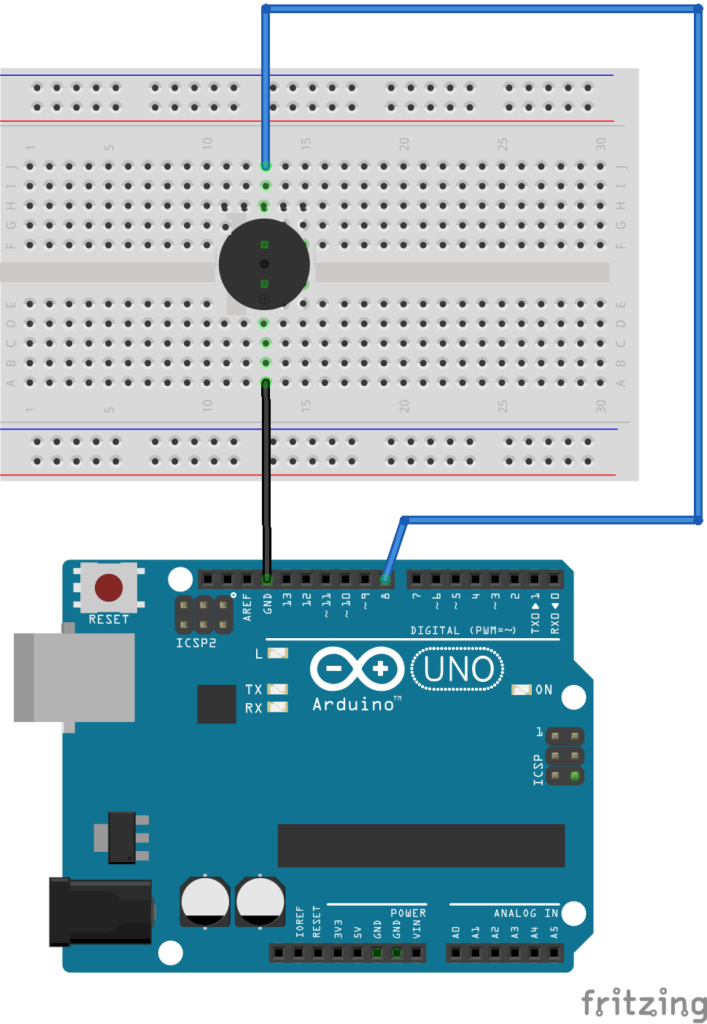
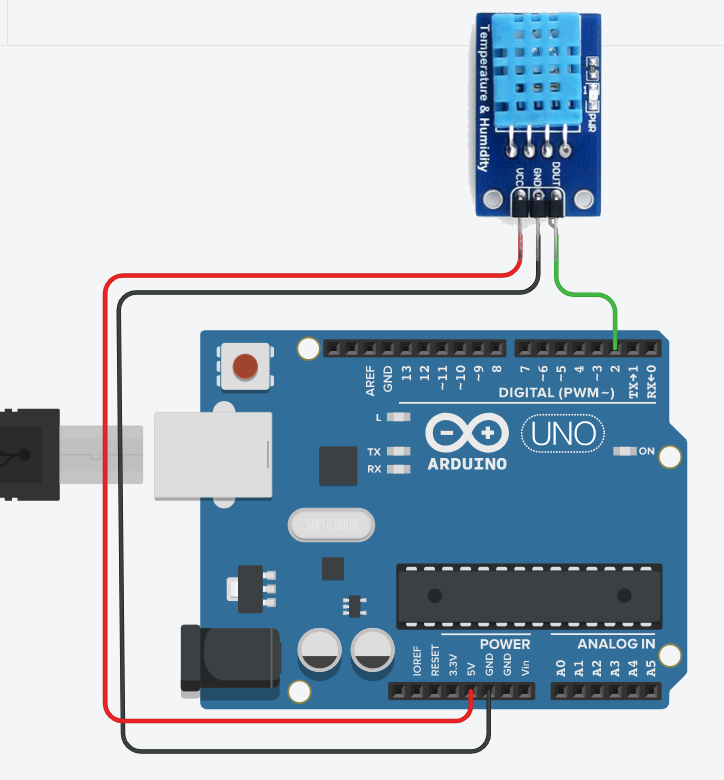
Collegamento Circuitale:
Viene in seguito riportato lo schema elettrico utilizzato per valutare la temperatura mediante il dispositivo elettronico DHT11
Codice:
Per il funzionamento del dispositivo è necessario caricare la libreria DHT.h nell’ide. Successivamente va definito il tipo di dispositivo che si sta utilizzando (nel nostro caso DHT11). Tale informazione va inserita nella dichiarazione dell’oggetto DHT ( DHT dht(DHTPIN, DHTTYPE); ).
La proprietà readTemperature restituisce la temperatura in gradi Celsius come default, a meno che non si inserisce un valore booleano true come argomento. In questo caso la temperatura verrà espressa in gradi Farhenait.
La proprietà readHumidity restituisce l’umidità relativa (RH).
Personalizzazioni:
E’ possibile modificare il circuito aggiungendo un display per visualizzare i valori di temperatura e umidità.