Controllo di un LED Mediante Telecomando SAMSUNG
Obiettivo: Controllo ON/OFF di un LED mediante il telecomando SAMSUNG ad infrarossi.
Componenti elettronici:
- Arduino
- Telecomando di un televisore SAMSUNG
- Ricevitore IR
- 1 Resistenza 100 Ohm
- 1 LED
Pre-requisiti:
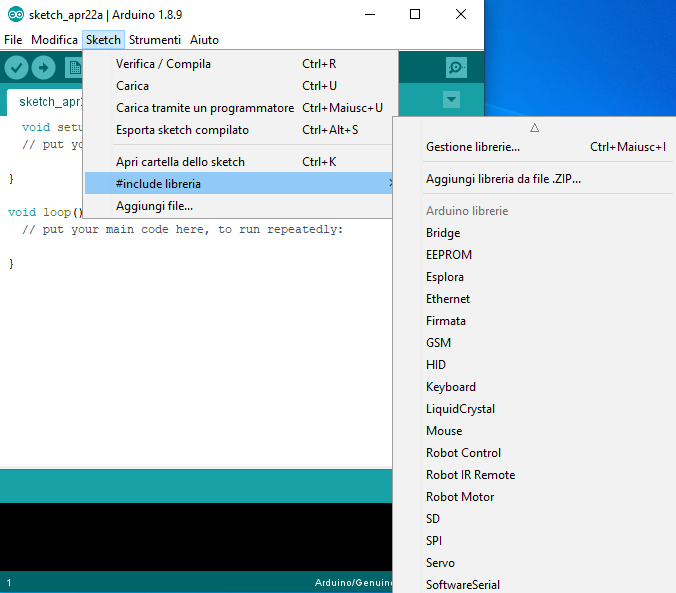
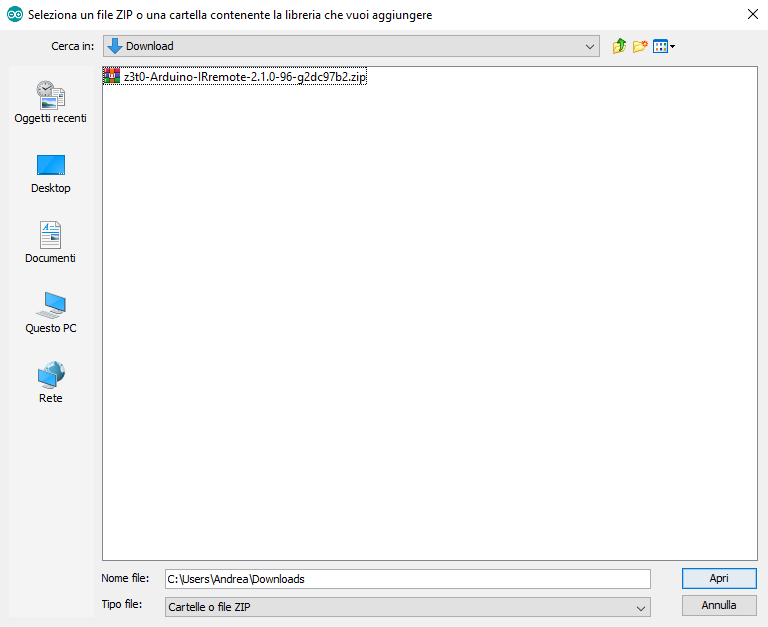
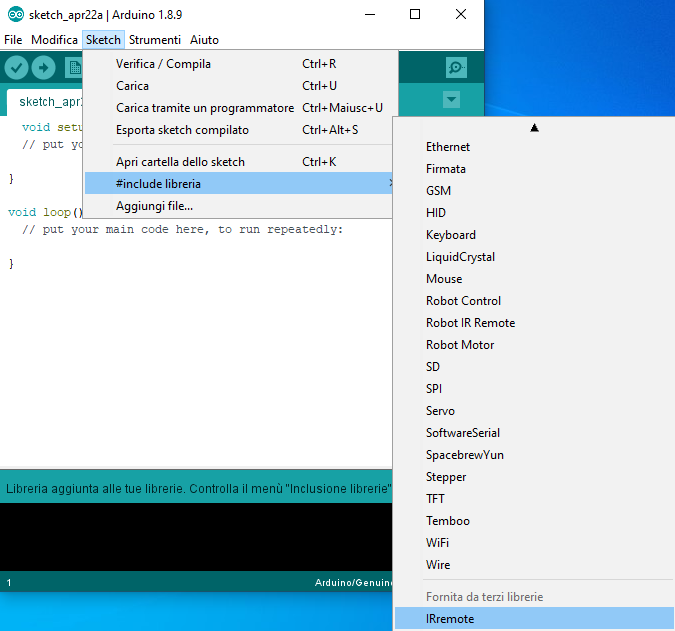
Per utilizzare il sensore ad Infrarossi ed il telecomando è necessario installare la libreria IRremote. Per scoprire come installare la libreria IRremote consultare la seguente lezione:
Teoria: Il telecomando è un dispositivo elettronico, sviluppato negli anni 50, che permette di inviare (ma non di ricevere) segnali ad un altro dispositivo situato a distanza per comandarlo.
In genere, i telecomandi tradizionali sono in grado di trasmette il segnale fino ad una distanza di circa 20 metri sotto forma di raggi infrarossi codificati.
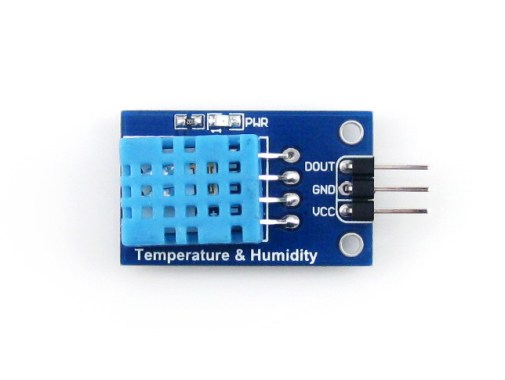
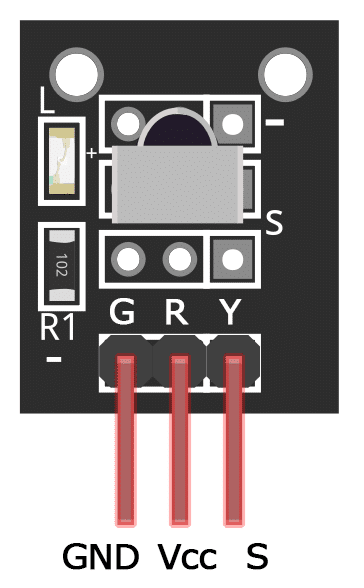
Affinché il dispositivo da comandare possa ricevere i segnali inviati dal telecomando è necessario utilizzare un ricevitore ad infrarossi tipicamente fornito con il telecomando. La maggior parte dei ricevitori ad infrarossi in commercio sono dotati di 3 pin. Nel caso specifico, viene utilizzato il sensore KY 022, sul quale in prossimità dei connettori sono riportate tre lettere (G, R, Y)
- Alimentazione (R)
- Ground (G)
- Uscita (Y)
Il pin di uscita (Y) del ricevitore permette di inviare al microcontrollore (al quale è collegato il ricevitore) il segnale ricevuto dal telecomando. E’ importante considerare come ad ogni pulsante del telecomando sia associato un codice univoco. Tali codici variano in funzione dei vari telecomandi; pertanto prima di realizzare il programma finale è importante ottenere il valore del codice associato ai vari pulsanti.
Nel caso specifico, si è deciso di utilizzare un telecomando SAMSUNG di una SMART TV. Utilizzando il software riportato in seguito è stato possibile determinare i codici associati ai vari pulsanti:
| Pulsante | Codice |
| ON/OFF Button | 3772793023 |
| UP Button | 3772795063 |
| DOWN Button | 3772778743 |
| Number 0 | 3772811383 |
| Number 1 | 3772784863 |
| Number 2 | 3772817503 |
| Number 3 | 3772801183 |
| Number 4 | 4120482440 |
| Number 5 | 3772813423 |
| Number 6 | 3772797103 |
| Number 7 | 3772788943 |
| Number 8 | 3772821583 |
| Number 9 | 3772805263 |
| MENU | 3772799143 |
Se il telecomando a disposizione è differente da quello proposto in questa lezione è possibile ottenere i codici eseguendo il software riportato in seguito. Una volta ottenuti i codici, è possibile attraverso il seguente collegamento circuitale scrivere il programma per comandare un LED attraverso il pulsante di ON/OFF del telecomando.
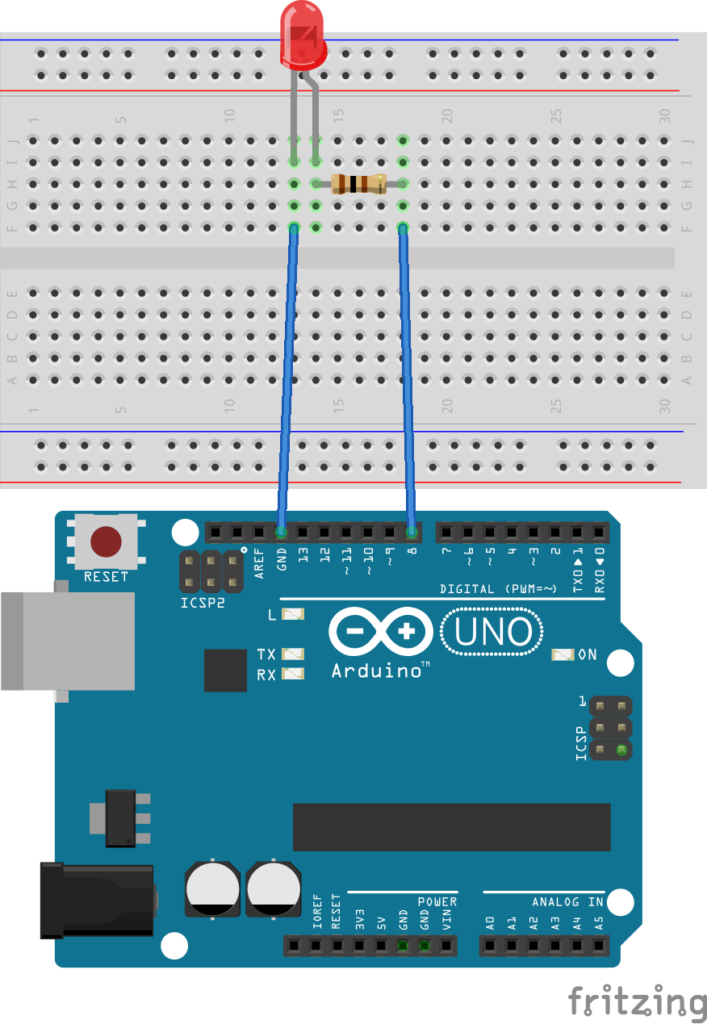
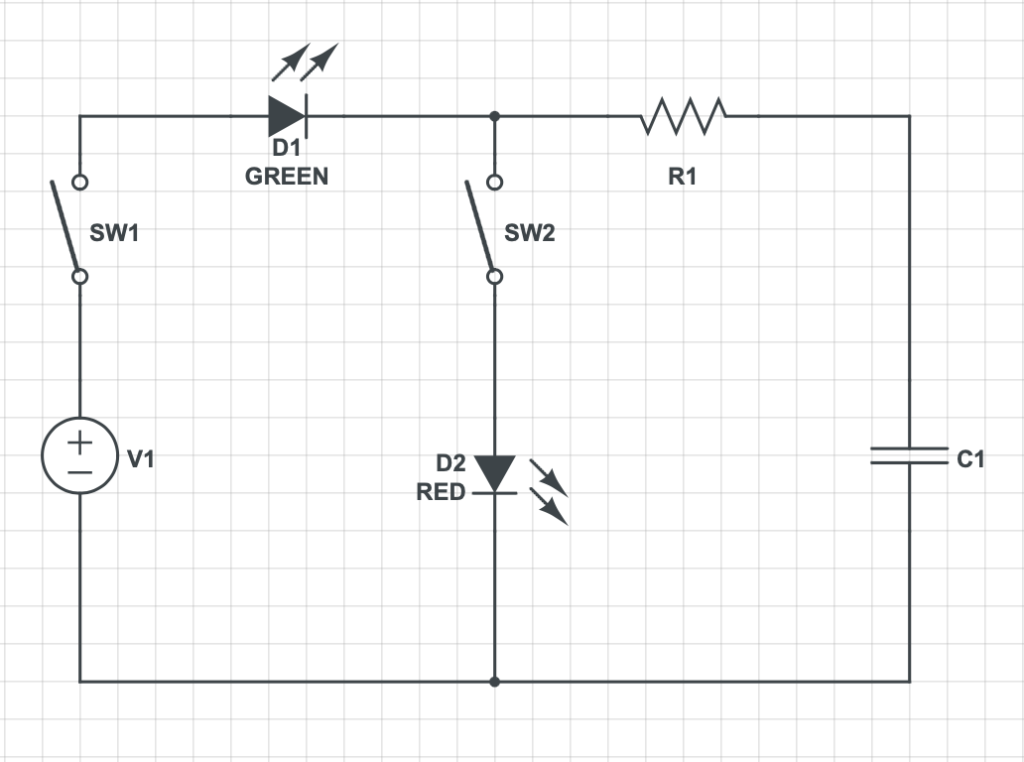
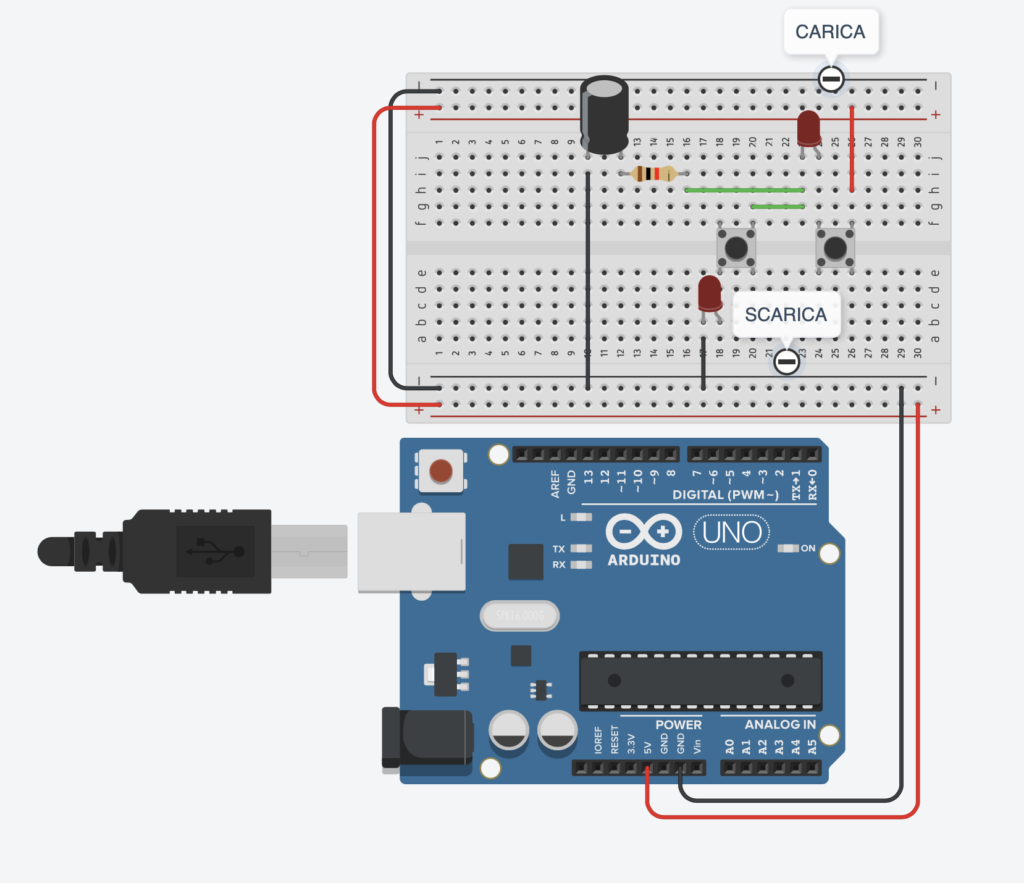
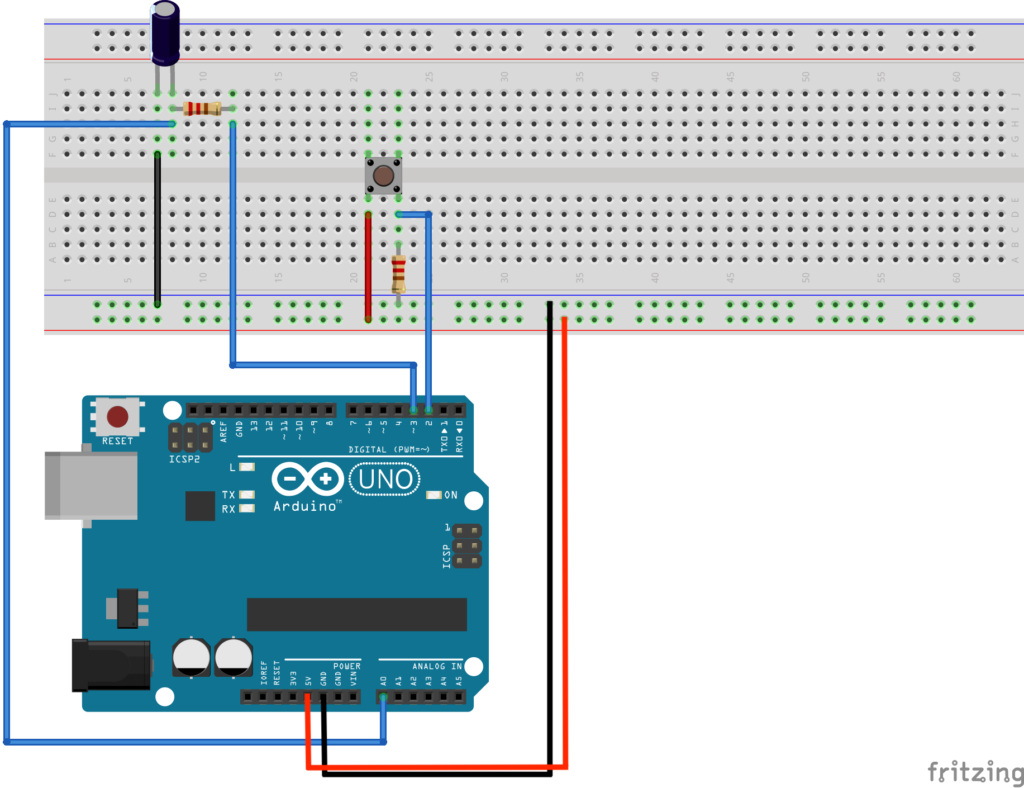
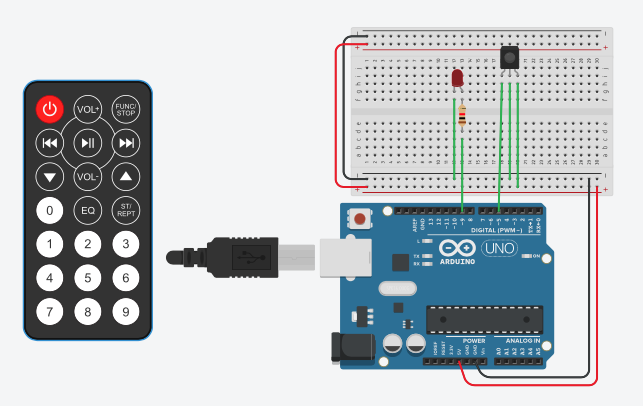
Collegamento Circuitale:
Codice:
A seguire viene riportato il software utile per determinare i codici associati ad ogni pulsante del telecomando a IR.
Ottenuto il codice associato al pulsante desiderato è possibile modificare il software per comandare l’azionamento di un LED mediante telecomando a IR. Il programma è molto simile al precedente viene solamente aggiunta la parte di codice relativa alla gestione del LED ed una istruzione IF per determinare se il pulsante premuto è quello di ON/OFF. E’ importante infatti considerare che il LED si accenderà solamente quando il pulsante di ON/OFF è premuto.
Personalizzazioni:
E’ possibile aggiungere più LED e comandare i vari LED con i vari pulsanti del telecomando.