Misura di Temperatura mediante TMP36 [Tinkercad]
Obiettivo: Realizzare un controllo di temperatura mediante il dispositivo TMP36. Il TMP36 è il sensore di temperatura presente sul simulatore tinkercad.
Componenti elettronici:
- Arduino UNO
- Breadboard
- TMP36
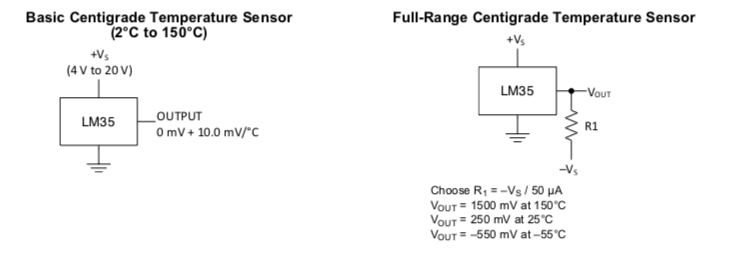
Teoria: Il componente elettronico TMP36 è un dispositivo integrato ad alta precisione utilizzato per misurare la temperatura ambientale.
Dato il basso costo e l’ampia scala di valori ammissibili (ovvero da -40°C fino a 125°C) questi dispositivi sono particolarmente diffusi. E’ inoltre importante considerare che non è necessaria nessuna operazione calibrazione per ottenere valori di accuratezza pari a ±1°C ad una temperatura di circa +25°C e ±2°C nel range di temperature −40°C to +125°C.
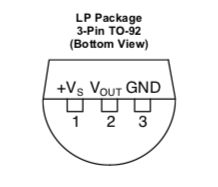
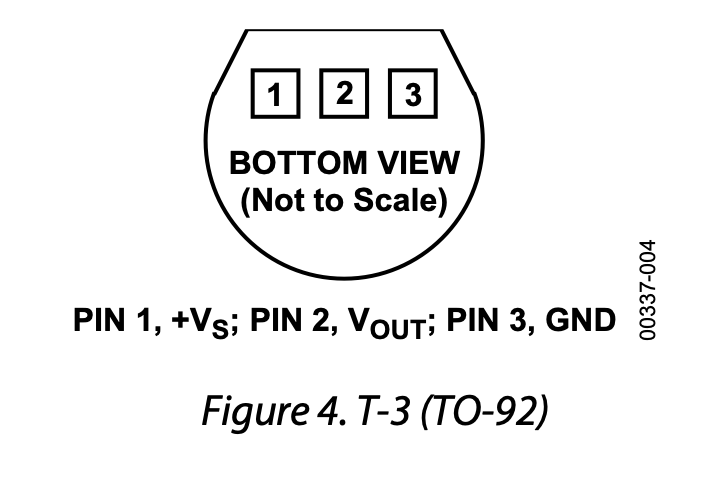
Questo dispositivo è caratterizzato da tre differenti pin ed un corpo semi-cilindrico. Guardando il lato piatto del dispositivo, il pin di sinistra è l’alimentazione (5V), il pin di destra la massa (GND), mentre sul pin centrale viene generata una tensione funzione della temperatura. La temperatura può essere pertanto misurata attraverso una lettura analogica sul pin centrale effettuata mediante il controllore Arduino.
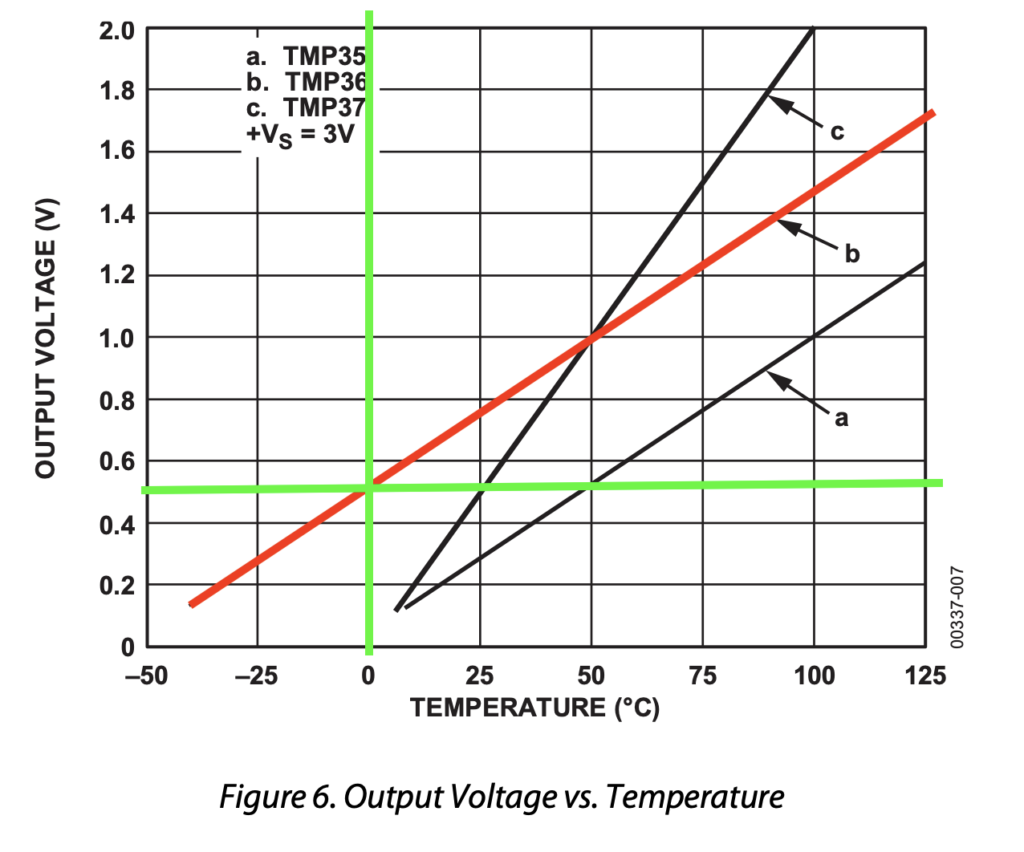
Come riportato in precedenza è possibile utilizzare un pin di input analogico per ottenere il valore di temperatura mediante l’istruzione di analogRead. Nel caso specifico, osservando il grafico che riporta la caratteristica tensione/temperatura (per il TMP36 la linea è evidenziata in rosso) per una tensione di uscita di 0.5V il sensore rileva la temperatura di 0°C. Pertanto valori di tensione inferiori a 0.5V indicano una temperatura sotto lo zero, mentre valori di tensione superiori a 0.5V indicano una temperatura positiva. Inoltre, è importante considerare che “una variazione di grado corrisponde ad una variazione di tensione di 10mV”. Quindi, se sul pin di input analogico sono presenti 550mV significa che il sensore sta rilevando una temperatura di 5°C (550mV – 500mV = 50 mV variazione di 5°C).
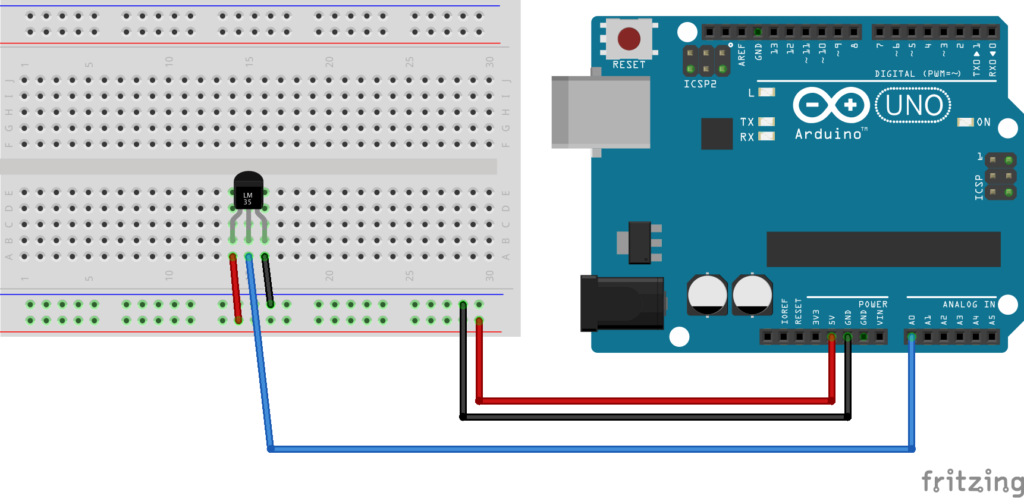
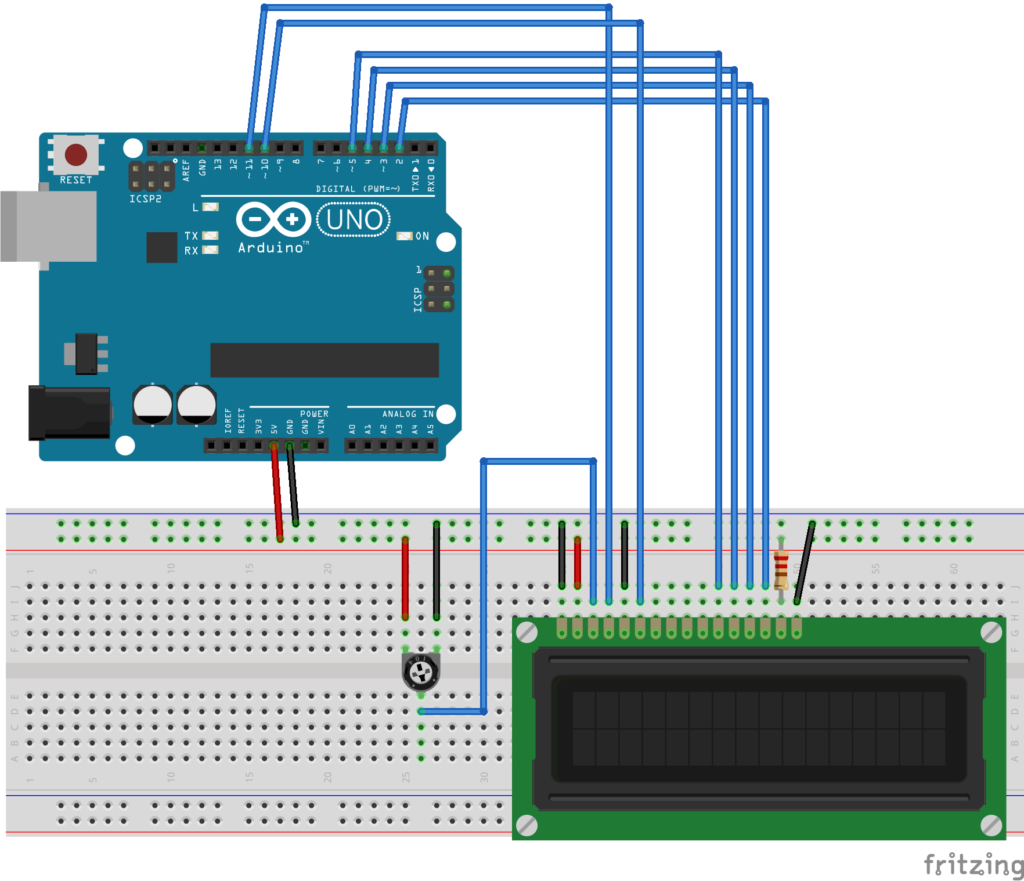
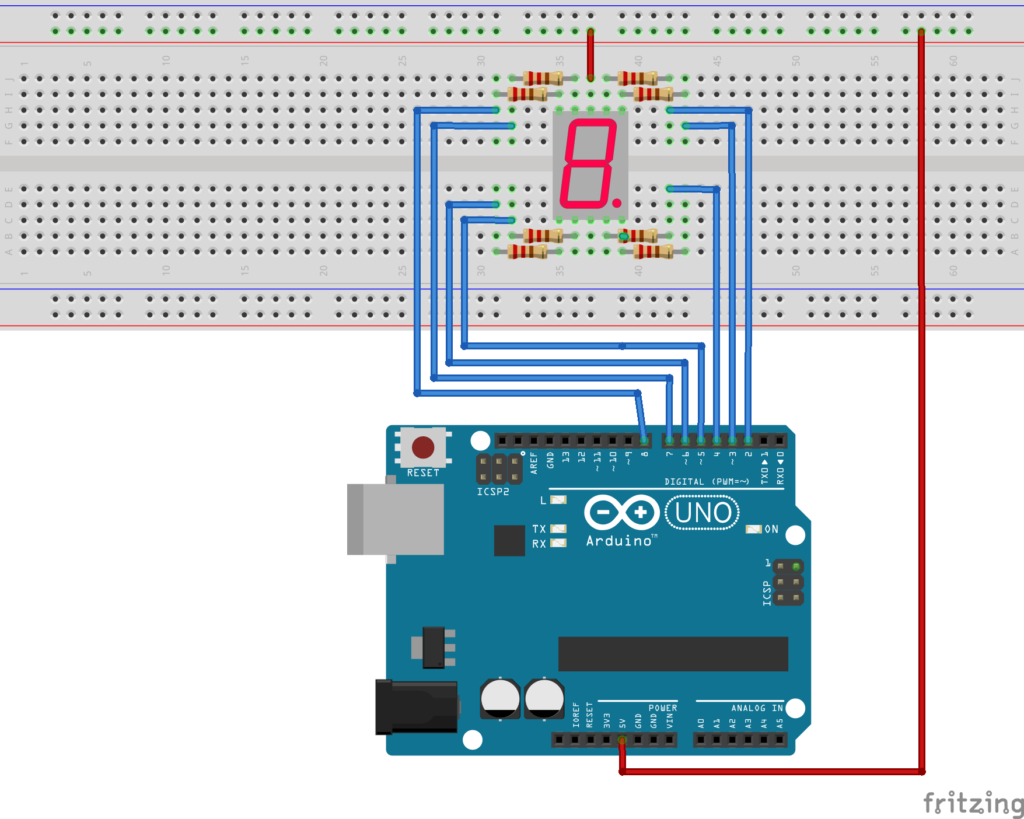
Collegamento Circuitale:
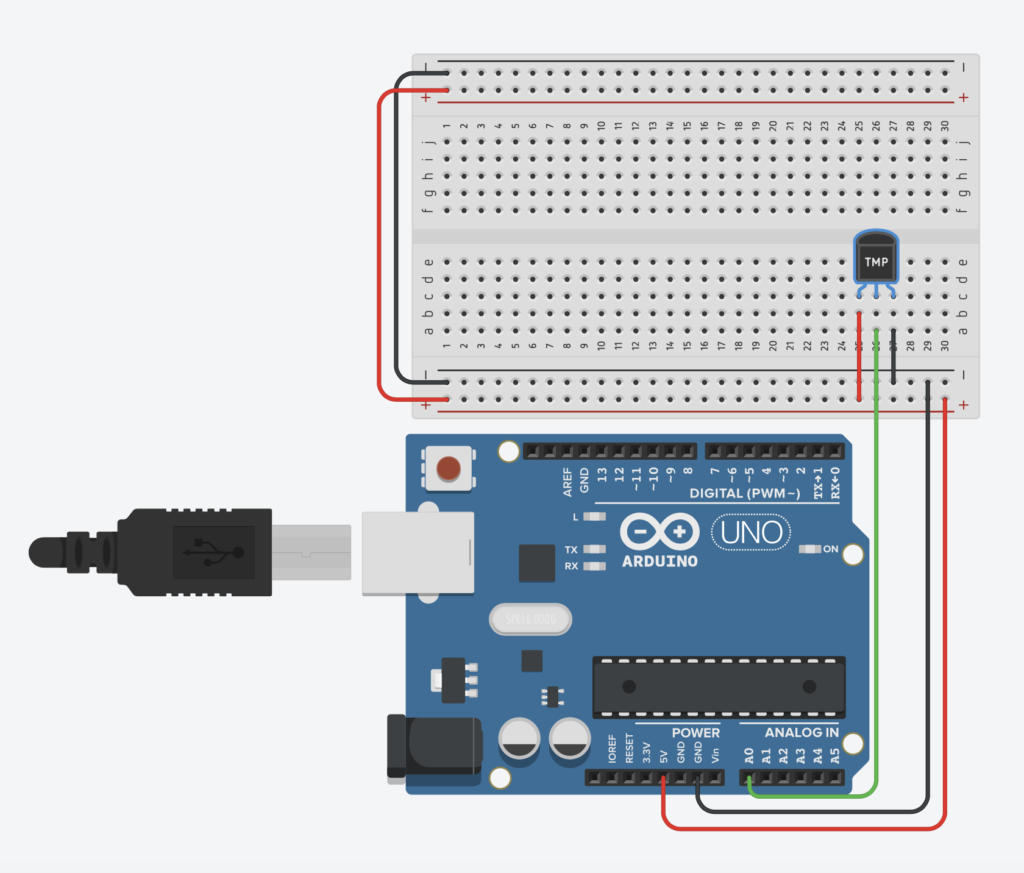
Viene in seguito riportato lo schema elettrico utilizzato per valutare la temperatura mediante il dispositivo elettronico TMP36
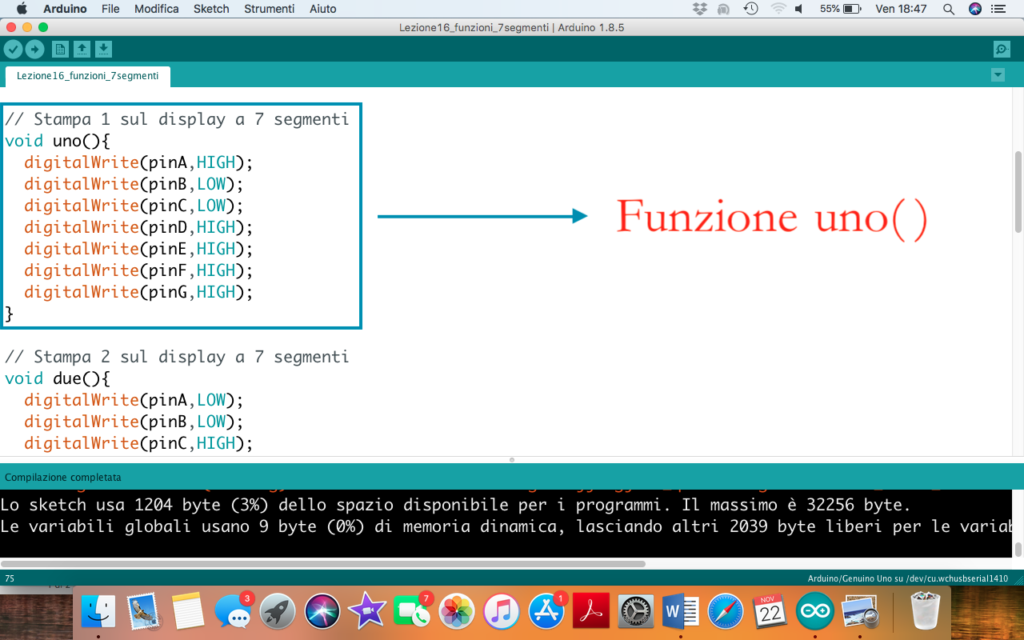
Codice:
La temperatura viene determinata attraverso una lettura analogica ed una opportuna scalatura.
Nel dettaglio, la tensione prodotta dal componente TMP36 viene letta utilizzando il pin analogico A0 e mappata in un intervallo 0-1023. Considerando che alla temperatura di 0 gradi la tensione misurata è pari a 0.5V e che per ogni grado percepito si ha un incremento di tensione di 10mV è opportuno riportare il valore letto attraverso la funzione analogRead in mV ed eseguire un’opportuna scalatura. Pertanto se il valore letto mediante l’istruzione di analogRead è memorizzato in una variabile denominata valTMP la temperatura può essere ottenuta mediante la seguente formula:
temperatura = (((valTMP5.0)/1023.0)-0.5)*100
Tinkercad
Personalizzazioni:
E’ possibile modificare il circuito aggiungendo una ventola che si accende in modo automatico superata una determinata temperatura.