Blinking Led Senza Delay: MILLIS()
Obiettivo: Realizzazione del classico blinking led senza utilizzare la funzione Delay
Componenti elettronici:
- Arduino UNO
- Breadboard
- Led
- Resistenza (100 Ohm)
Teoria: Se da un certo punto di vista l’impiego della funzione delay è particolarmente utile per la realizzazione di semplici applicativi; da un altro punto di vista molteplici potrebbero essere gli inconvenienti legati all’utilizzo di questa funzione.
E’ infatti, molto importante, considerare che l’istruzione delay è un’istruzione bloccante. Questa istruzione “congela” Arduino nel suo stato corrente, pertanto negli istanti di delay non è possibile fare aggiornamenti, gestire input attraverso letture o comandare attuatori mediante scritture.
Ad esempio, nel caso della realizzazione di un semaforo per perdoni, dove è possibile effettuare la chiamata mediante la pressione di un pulsante, l’impiego della funzione delay è altamente sconsigliato per la gestione del semaforo perchè questo renderebbe invisibile la pressione del pulsate.
Per tutte queste ragioni è opportuno scrivere codici senza l’impiego della funzione delay. Nel dettaglio è opportuno sostituire la funzione delay con la più funzionale ma meno pratica funzione millis.
La funzione millis restituisce il numero di millisecondi che sono passati da quando la board Arduino ha eseguito il programam corrente. Questo numero si riazzera dopo circa 50 giorni.
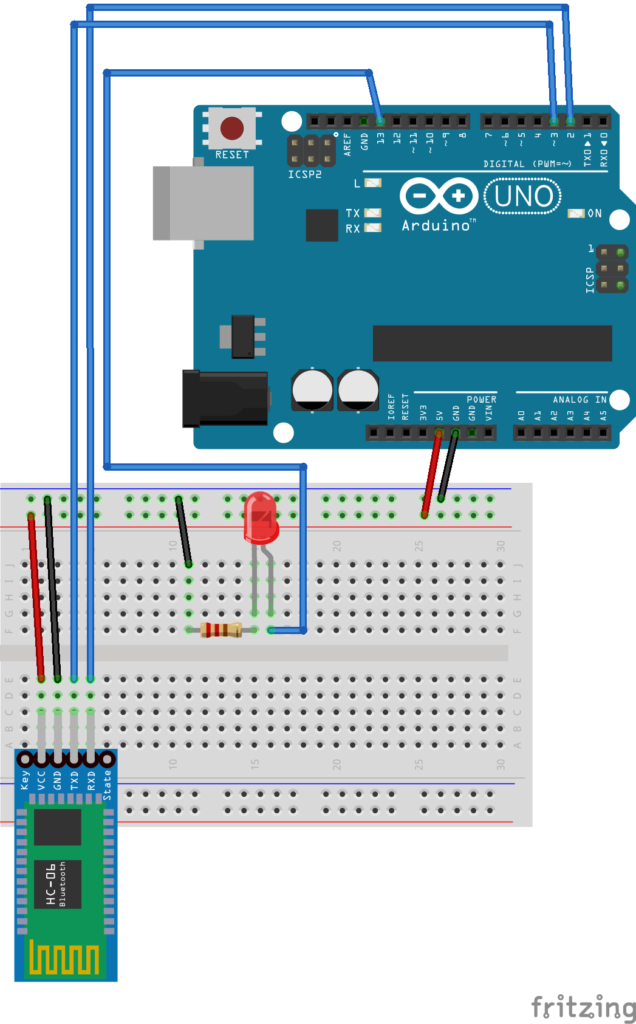
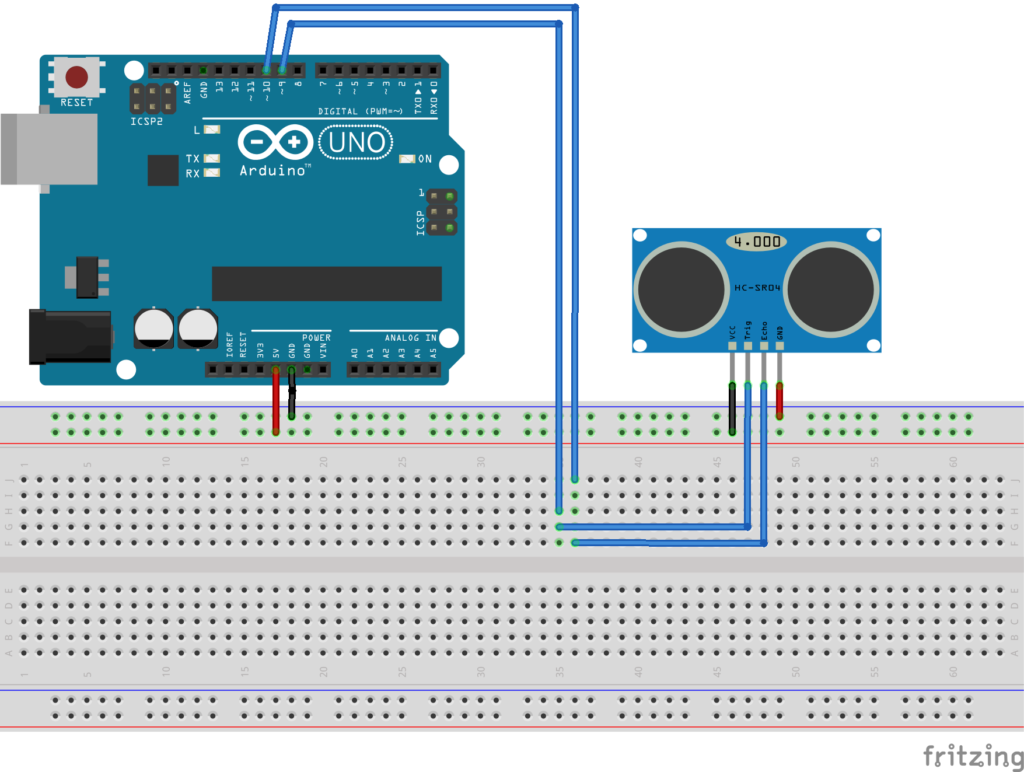
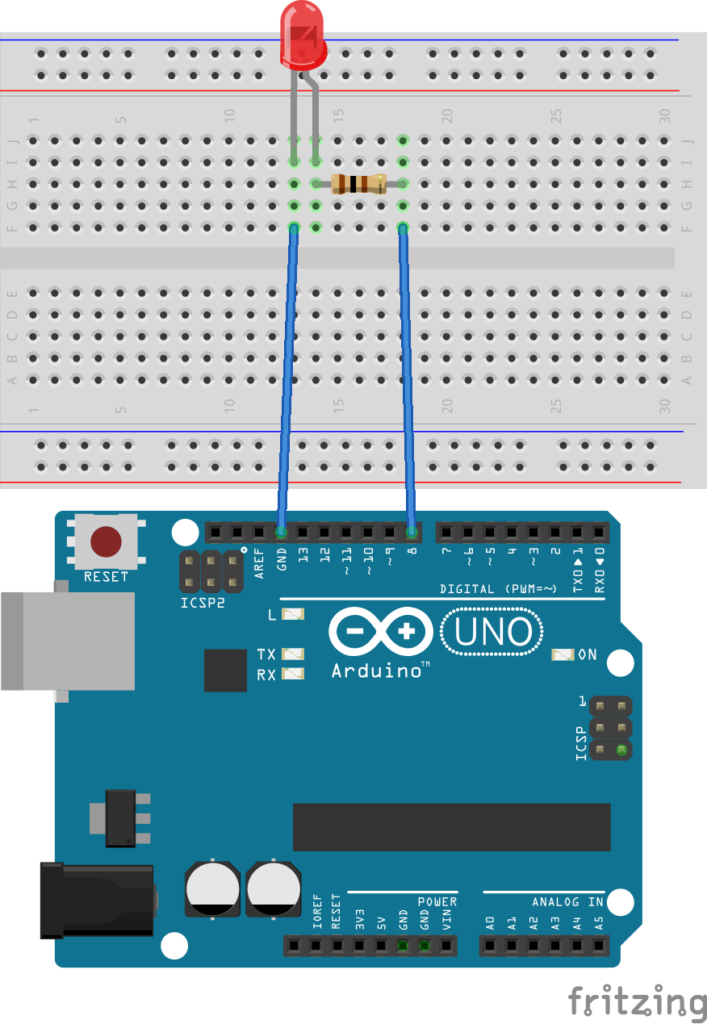
Collegamento Circuitale:
Codice:
A seguire viene riportato il codice utilizzato per fare lampeggiare il led senza delay. Nello specifico il codice memorizza l’ultimo istante in cui è avvenuta una azione (il led ha cambiato stato) nella variabile previousMillis mentre nella variabile currentMillis viene memorizzato il tempo corrente. Attraverso la differenza tra questi due tempi si comprendere se il led deve cambiare stato (accendersi o spegnersi). Nel dettaglio, se la differenza tra la variabile currentMillis e previousMillis è maggiore di 1000 millisecondi allora lo stato del led cambia.
Personalizzazioni: E’ possibile modificare il comportamento del circuito in questione intervenendo sul valore della variabile interval. Modificando il suo valore infatti cambia la frequenza di lampeggiamento del LED.
E’ inoltre possibile modificare il pin digitale utilizzato per pilotare il LED cambiando rispettivamente hardware e software.
L’utilizzo di una resistenza, in serie al LED, serve appunto per limitare la quantità di corrente presente sul diodo emettitore di luce.