Obiettivo: Ruotare un Servo Motore tramite un potenziometro
Pre-requisiti
Componenti elettronici:
- Arduino UNO
- Breadboard
- 1 Servomotore
- 1 Potenziometro
Teoria: Il Servomotore è uno particolare tipo motore ampiamente utilizzato sia in contesti industriali sia nell’ambito del modellismo. Nel dettaglio, il servomotore è impiegato in tutte le applicazioni che prevedono il controllo della posizione di in motore in corrente continua ed il raggiungimento di un determinato angolo in modo preciso indipendentemente dalla posizione iniziale. Le caratteristiche principali del servomotore sono:
Come già accennato, i servo motori sono dispositivi molto utilizzati in svariati ambiti perché permettono la rotazione del proprio albero in base ad un angolo prestabilito.
I servomotori sono stati utilizzati per la prima volta nel mondo del modellismo RC, generalmente per controllare lo sterzo delle auto RC o i flap su un aereo RC o per aprire botole su un drone. Con il tempo, hanno trovato il loro uso anche nella robotica, nell’automazione e in svariati progetti Arduino.
Solitamente l’albero può ruotare da 0 a 180 gradi e usando Arduino, possiamo dire a un servo di andare in una posizione specificata
In questo tutorial vedremo come interconnettere il servo motore ad Arduino e come farlo ruotare tramite un potenziometro con pochissime istruzioni.
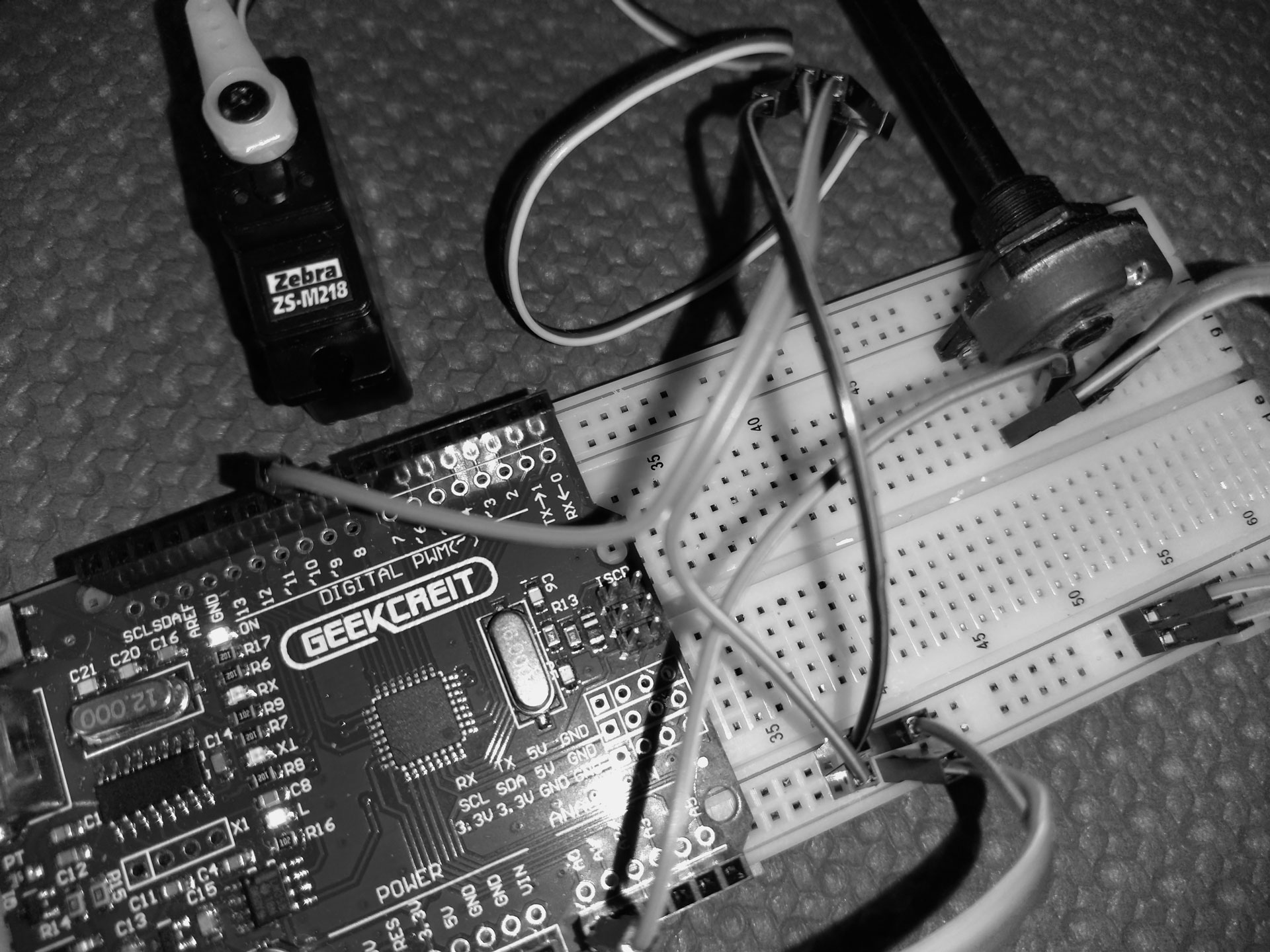
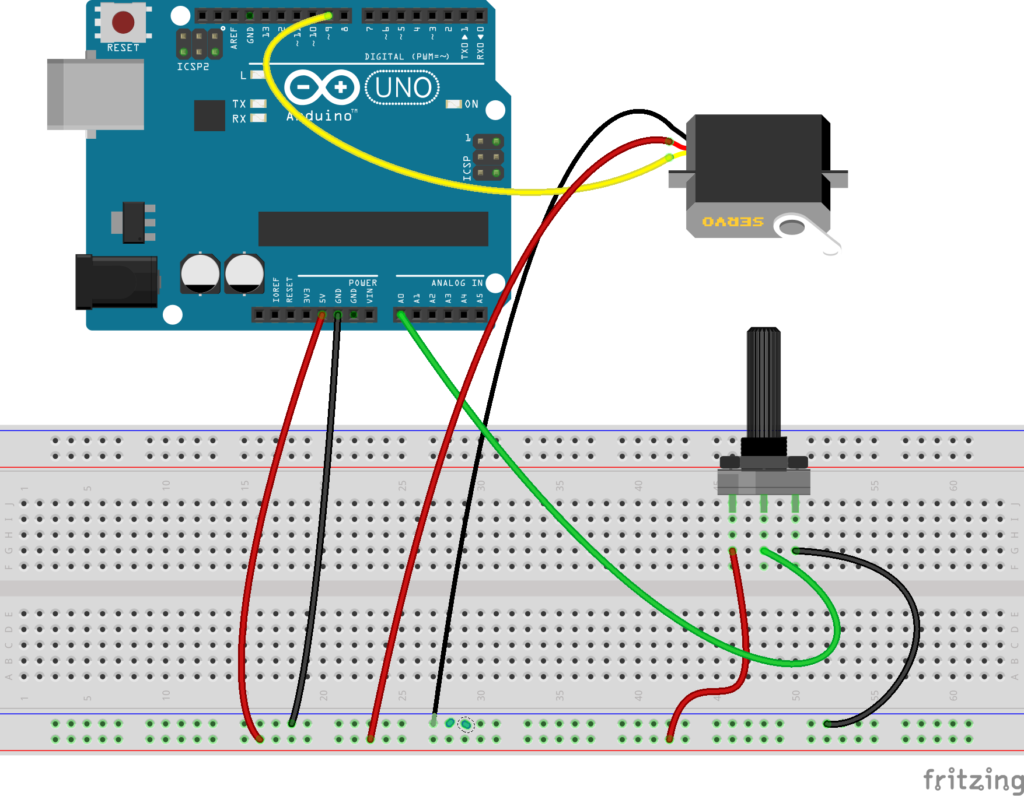
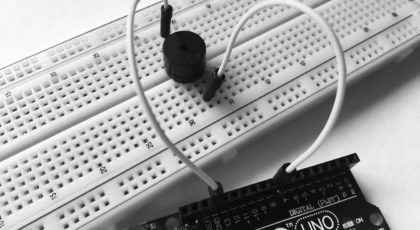
Collegamento Circuitale:
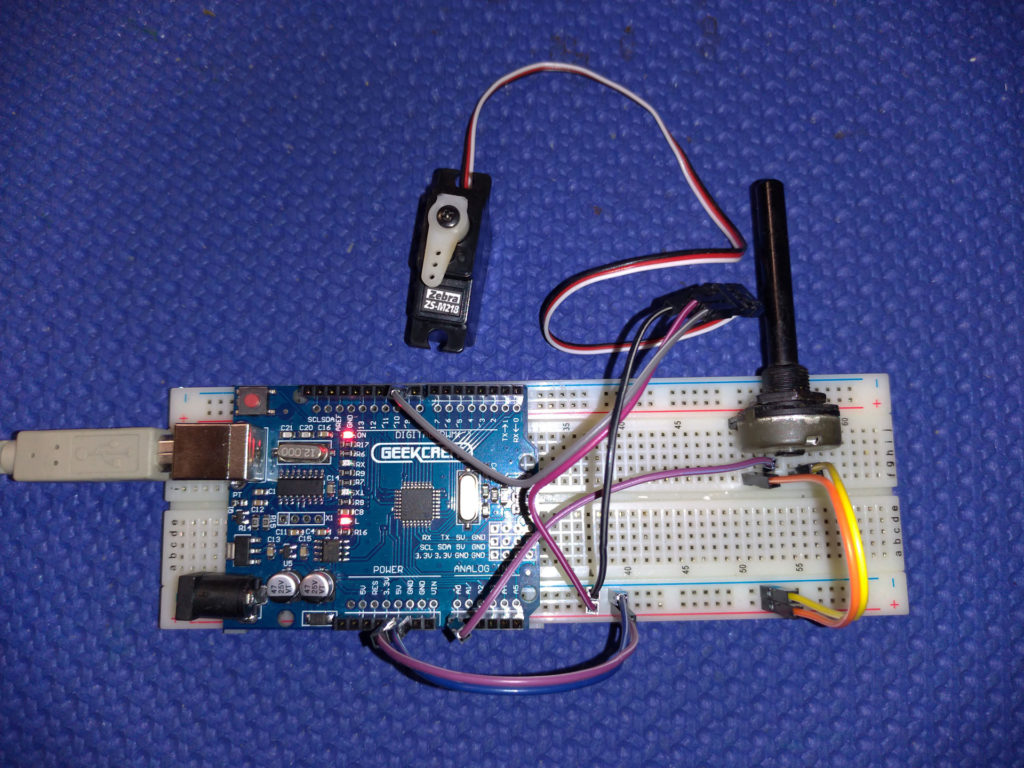
Risultato:
Codice:
| /* | |
| Lezione 14: Controllo di un Servo Motore tramite Potenziometro | |
| Creato il 28 Ott 2019 | |
| da Emanuele Tonucci | |
| */ | |
| #include <Servo.h> | |
| Servo myServo; // Oggetto Servo | |
| int pos = 0; // Posizione iniziale del servo motore | |
| int potPin = A0; // Ingresso analogico del potenziometro | |
| int potValue = 0; // Valore letto del potenziometro | |
| int outputValue = 0; // Valore mappato del potenziometro | |
| void setup() | |
| { | |
| myServo.attach(9); // Servo collegato al Pin 9 | |
| myServo.write(pos); // Inizializzazione posizione del Servo a 0° | |
| delay(50); | |
| } | |
| void loop() { | |
| // Lettura analogica del potenziometro | |
| potValue = analogRead(potPin); | |
| // Mappatura del range, il potenziometro | |
| // viene letto sul piedino A0 (valore da 0 a 1023) | |
| // e convertito tramite l'istruzione map | |
| // ad un valore compreso tra 0° e 180° | |
| // cioè gli angoli che il Servo può coprire | |
| pos = map(potValue, 0, 1023, 0, 180); | |
| myServo.write(pos); | |
| delay(30); | |
| } |
 by
by 

Ciao, come compileresti il codice se volessi usare un PCA9685 per comandare piu servo motori?
Ciao Tony, se sei interessato potremmo fare un articolo sullo shield in questione. Facci sapere!
ciao sono Alberto,avrei una domanda da porti: non riesco a caricare il tuo sketch, mi da errore nella riga” myServo.attach(9);” o meglio: ‘myServo’was not declared in this scope.
premetto che sono alle prime armi e che nella riga #include ho caricato dalla libreria la voce servo.
Salve Alberto,
la libreria è SERVO è installata? Può provare a controllare tra le librerie installate.
A presto.