Il Sensore di Parcheggio
Obiettivo: Realizzare un sensore di parcheggio
Componenti elettronici:
- Arduino UNO
- Breadboard
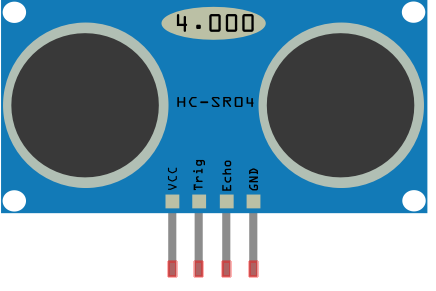
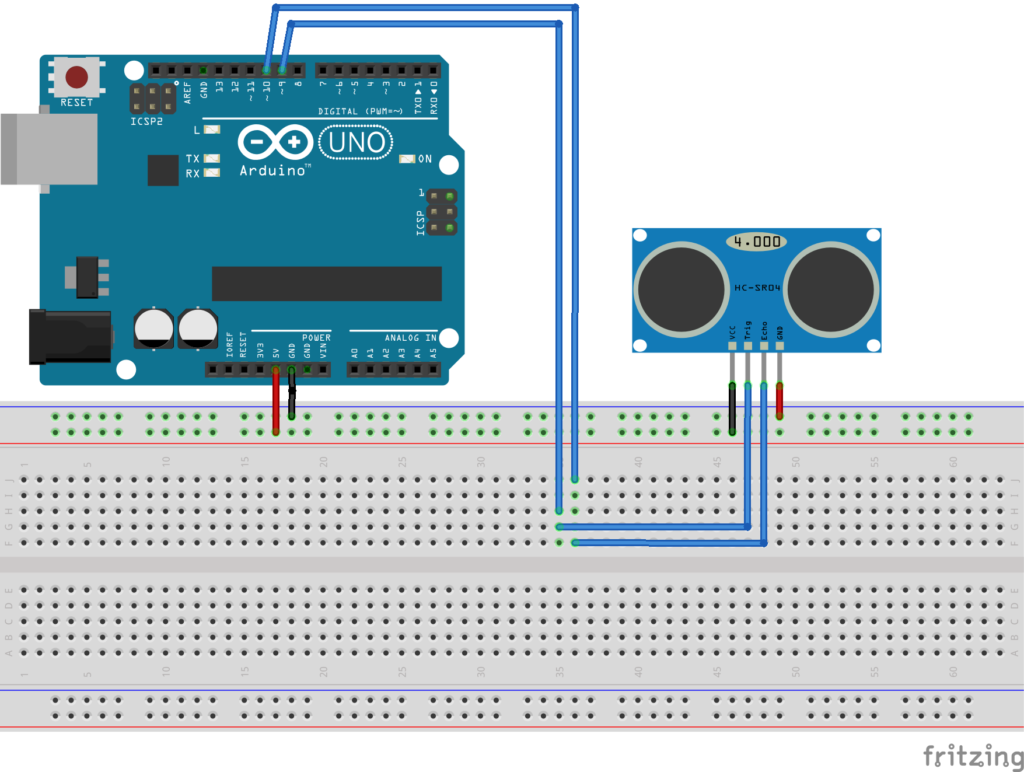
- 1 Sensore Ultrasuoni (e.g., HC-SR04)
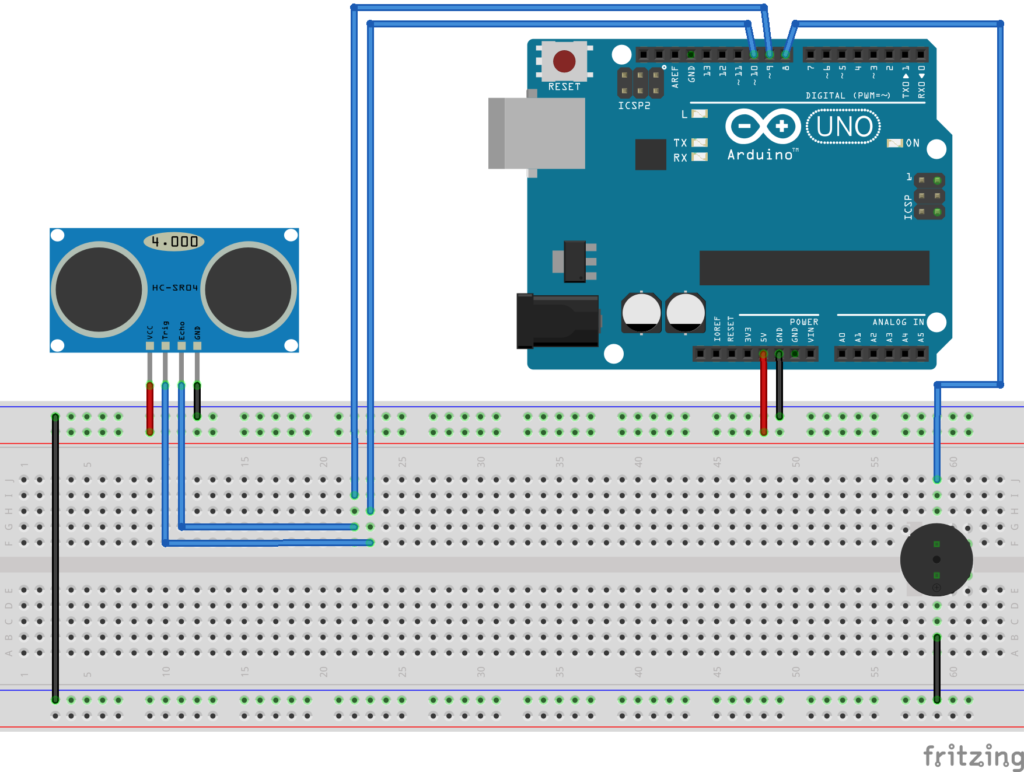
- 1 Buzzer
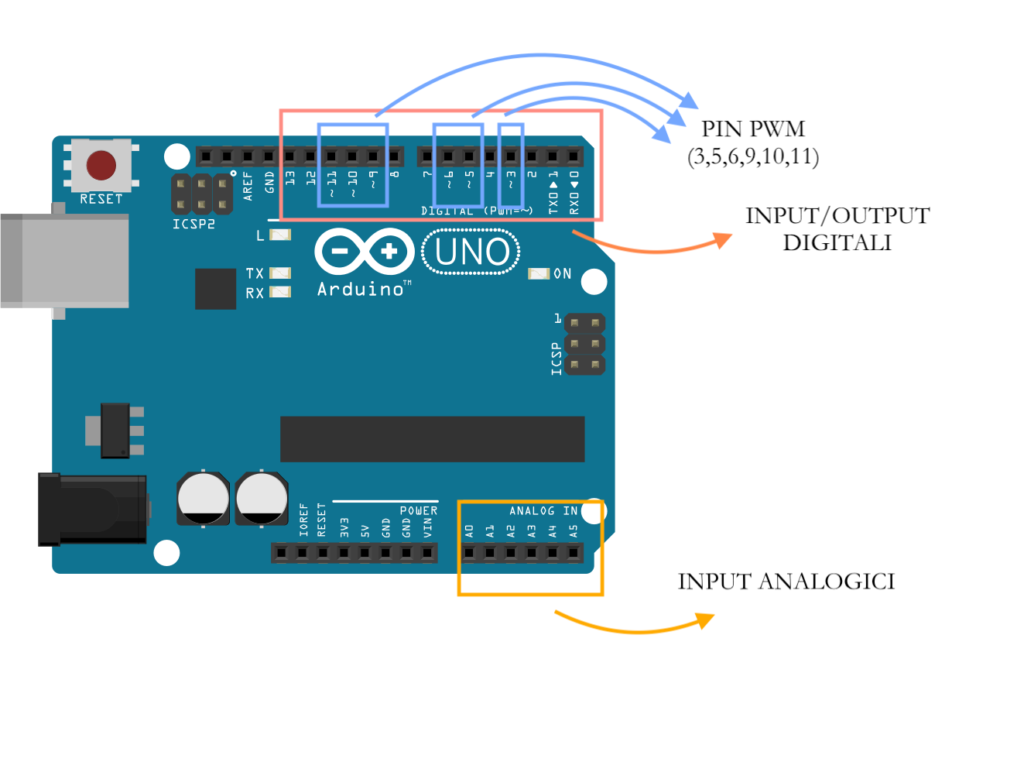
Pre-requisiti:
Teoria: Il sensore di parcheggio rappresenta una delle moderne tecnologie che permettono al guidatore di un autoveicolo di essere a conoscenza della distanza tra la propria automobile ed un eventuale altro veicolo. Questo permette di gestire in modo facile e rapido l’operazione di parcheggio evitando danneggiamenti o urti agli autoveicoli in questione.
Nel caso specifico, il sensore di parcheggio si basa su un sensore di prossimità ad ultrasuoni (INPUT) ed un buzzer (OUTPUT) utilizzato come segnalatore acustico.
Nel dettaglio, maggiore è la distanza maggiore sarà il ritardo tra una segnalazione acustica e la successiva, analogamente, minore è la distanza minore sarà il ritardo tra una segnalazione acustica e la successiva. In particolare, la relazione ingresso uscita che lega la distanza al ritardo impiegato nella segnalazione acustica è funzione dei seguenti quattro parametri:
- DistanzaMassima: la distanza massima dopo la quale non viene più segnalato un’ostacolo.
- DistanzaMinima: la distanza minima per la quale il buzzer emette un tono continuo
- RitardoMassimo: Il ritardo tra una segnalazione acustica e la successiva nel caso di massima distanza.
- RitardoMinimo: Il ritardo tra una segnalazione acustica e la successiva nel caso di minima distanza.
Questi valori vengono utilizzati al fine di determinare l’equazione fondamentale per il calcolo del ritardo:
ritardo = distanza*((RitardoMax-RitardoMin)/(DistanzaMax-DistanzaMin))
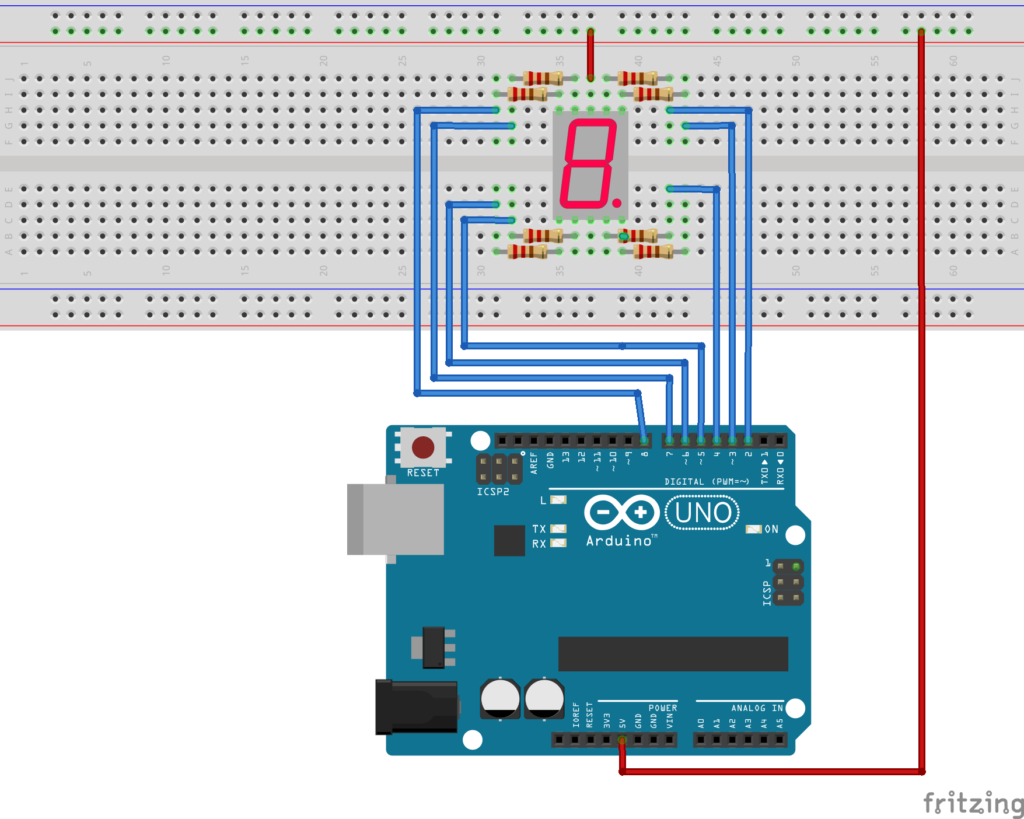
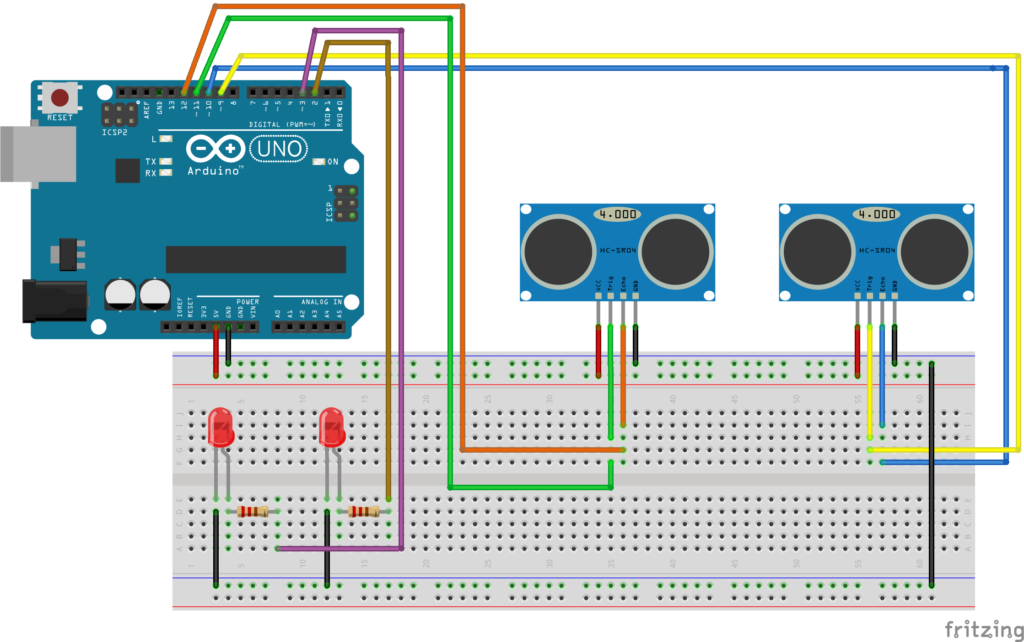
Collegamento Circuitale:
Codice:
Personalizzazioni: E’ possibile inserire un led al fine di avere un segnalatore visivo che indichi la distanza dall’ostacolo.